近些年,国内在无人机(UAV)技术的驱动下,基于无人机的航空磁测方法日渐成熟。其中旋无人直升机凭借良好的低空性能和垂直起降的优势,被越来越多的选用航磁探测平台。而在航空磁测中,提高航空磁测数据质量的主要方法是对飞机产生的干扰进行补偿。但旋翼无人机由于旋翼噪声、轻量化机身和自身性能限制不易完成标准的补偿飞行动作,不稳定的飞行姿态将加剧了补偿模型的多重共线性及噪声抑制难度。
针对这一问题,必赢电子游戏网站的焦健副教授,于平教授和硕士研究生赵肖在自行搭建的高精度无人直升机航磁测量系统(图1)基础上,根据无人直升机不稳定的补偿飞行姿态和独特的旋翼噪声等特点,结合经典滤波模型,首先建立了无人直升机航磁探测平台磁干扰模型(图2)。
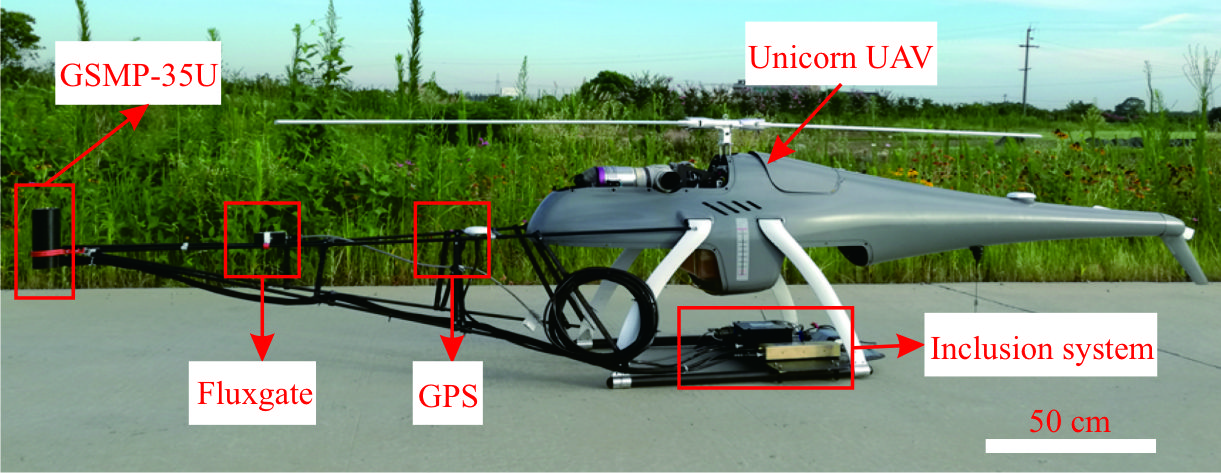
图1 无人直升机航磁测量系统
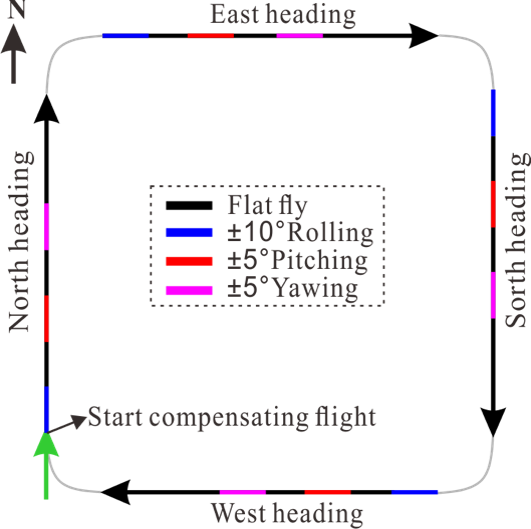
(a) (b)
图2 (a)无人直升机补偿飞行一维模型
(b)无人直升机补偿飞行三维模型
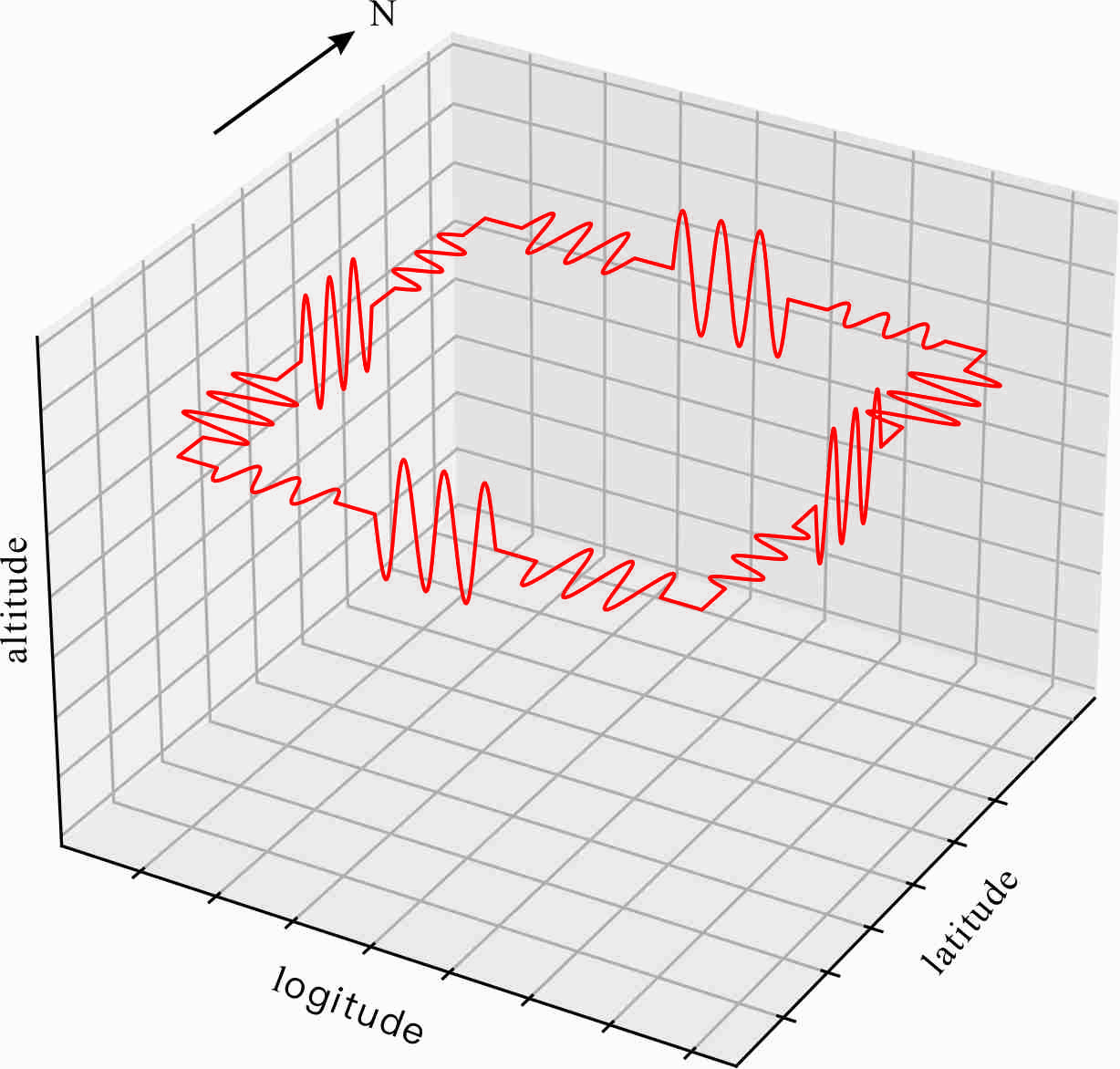
在对模型分析的基础上,为减少无人直升机补偿模型中的多重共线性,引入了深度学习领域的非监督学习自编码器(DAE)。在无人直升机平台上实现了性能良好的自编码器结构:三层隐藏层,激活函数和损失函数分别使用tanh和Huber获取无人直升机补偿飞行数据的特征,有效削弱了补偿模型中变量的多重共线性(图3),经实测数据验证,DAE补偿处理后某异常更加清晰,磁异常梯度带更加平滑。
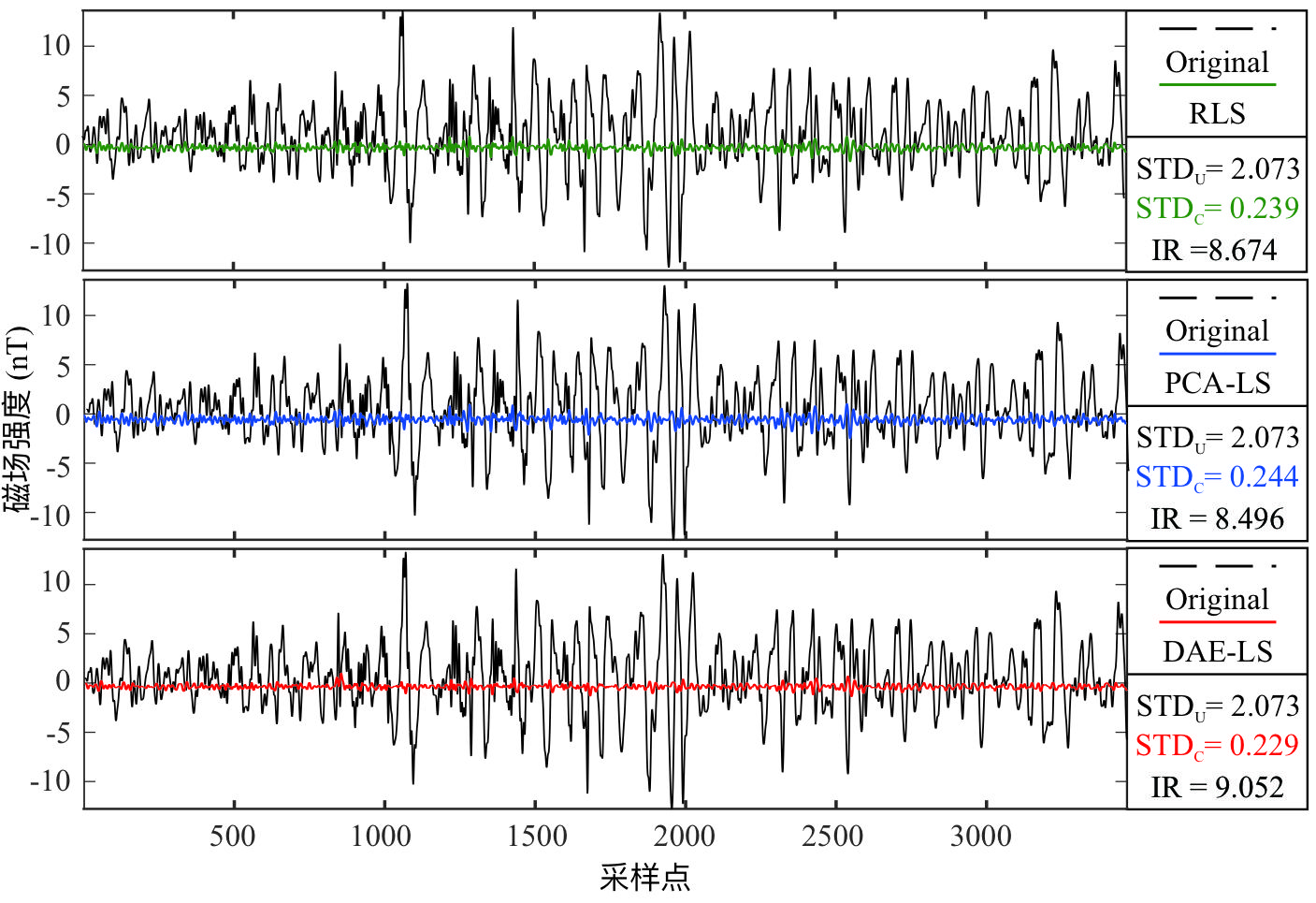
图3 飞行数据的RLS,PCA和DAE补偿结果对比
无人直升机在特定的飞行环境中难以执行标准的补偿飞行,因此会引入噪声,本文提出了一种具有较强函数拟合能力的广义回归神经网络(GRNN),并分析了影响其泛化能力的因素。分析概率密度函数得出,适合旋翼无人机数据的光滑因子值将提高PDF的估计精度(图4);此外,多组数据能有效补充因飞行不标准导致训练集中未覆盖的数据特征,提高了GRNN的泛化能力。
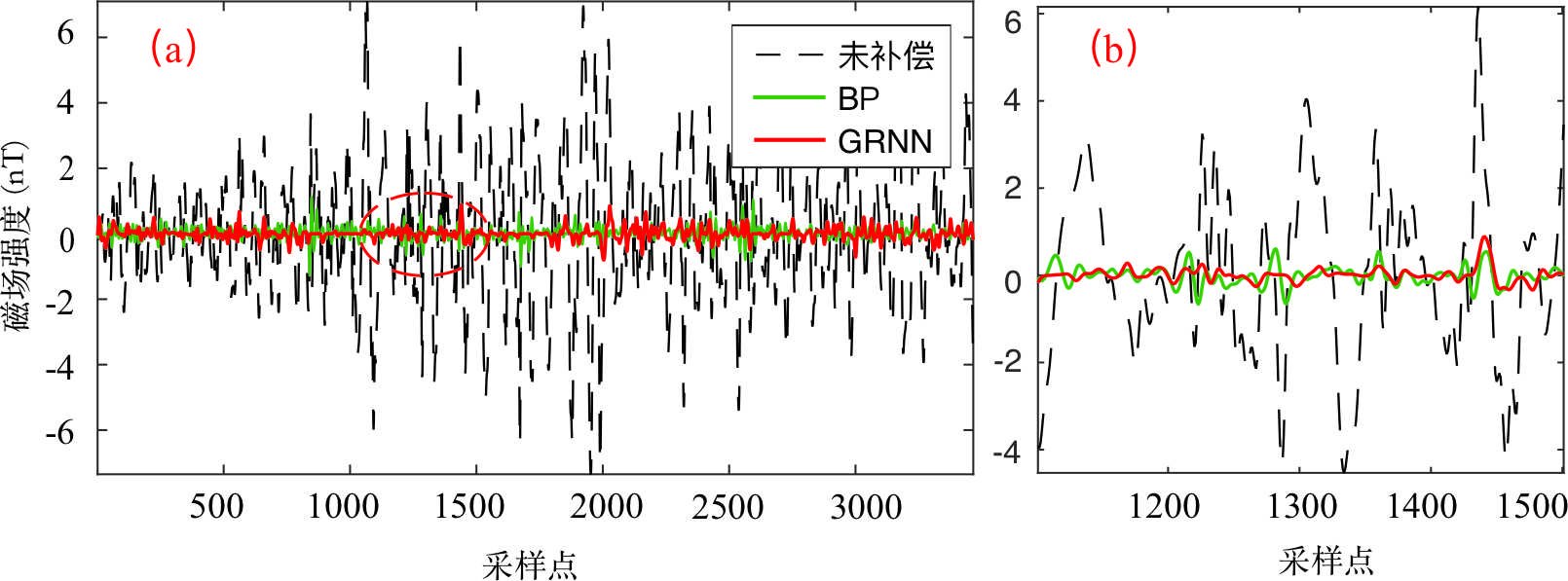
(a) 飞行数据LS和RR算法的补偿结果;(b)图(a)中红色圆圈的细节展示(飞行中样本点1100至1500)
图4 飞行的线性回归算法补偿结果
在结合前期取得的研究成果基础上,团队编写了航磁补偿软件(图5),其主要功能是实现飞行数据补偿自动计算,其次是对补偿算法、飞行质量评价。
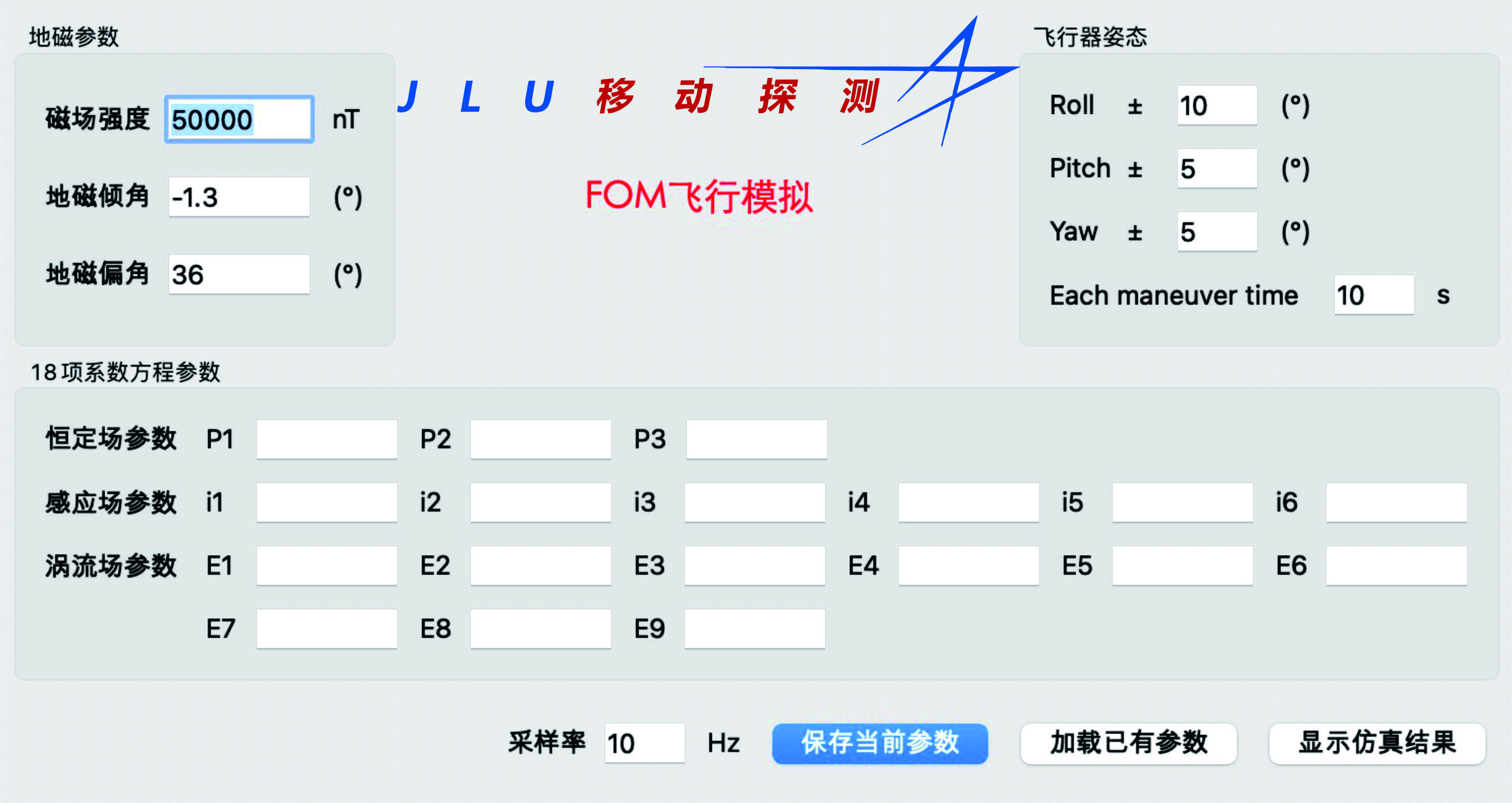
图5 航磁补偿软件界面
该项研究由bwin必赢登录入口赵肖硕士研究生、于平教授、焦健副教授(通讯作者)合作完成。相关工作得到了国家重点研发项目(2017YFC0602000,)和省自然基金项目(20200201039JC)共同资助。研究成果发表在国际权威地学期刊《IEEE GEOSCIENCE AND REMOTE SENSING LETTERS》和《Measurement Science and Technology》上,论文信息如下:https://doi.org/10.1155/2014/405671,https://doi.org/10.1088/1361-6501/abd1b4




